U-NetPlus: A Modified Encoder-Decoder U-Net Architecture for Semantic and Instance Segmentation of Surgical Instruments from Laparoscopic Images
EMBC 2019, Oral
- S. M. Kamrul Hasan Rochester Institute of Technology
- Cristian A. Linte Rochester Institute of Technology
Abstract
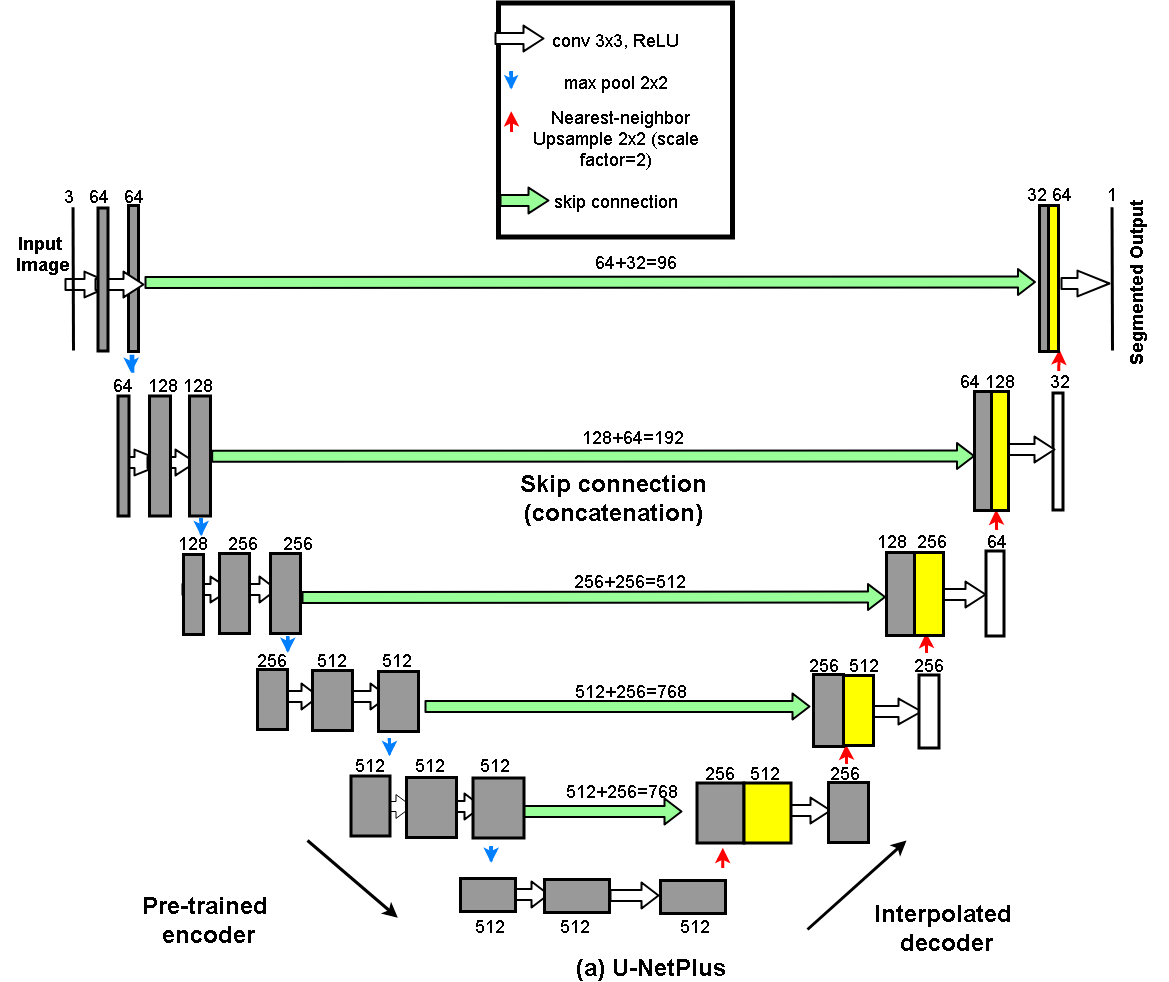
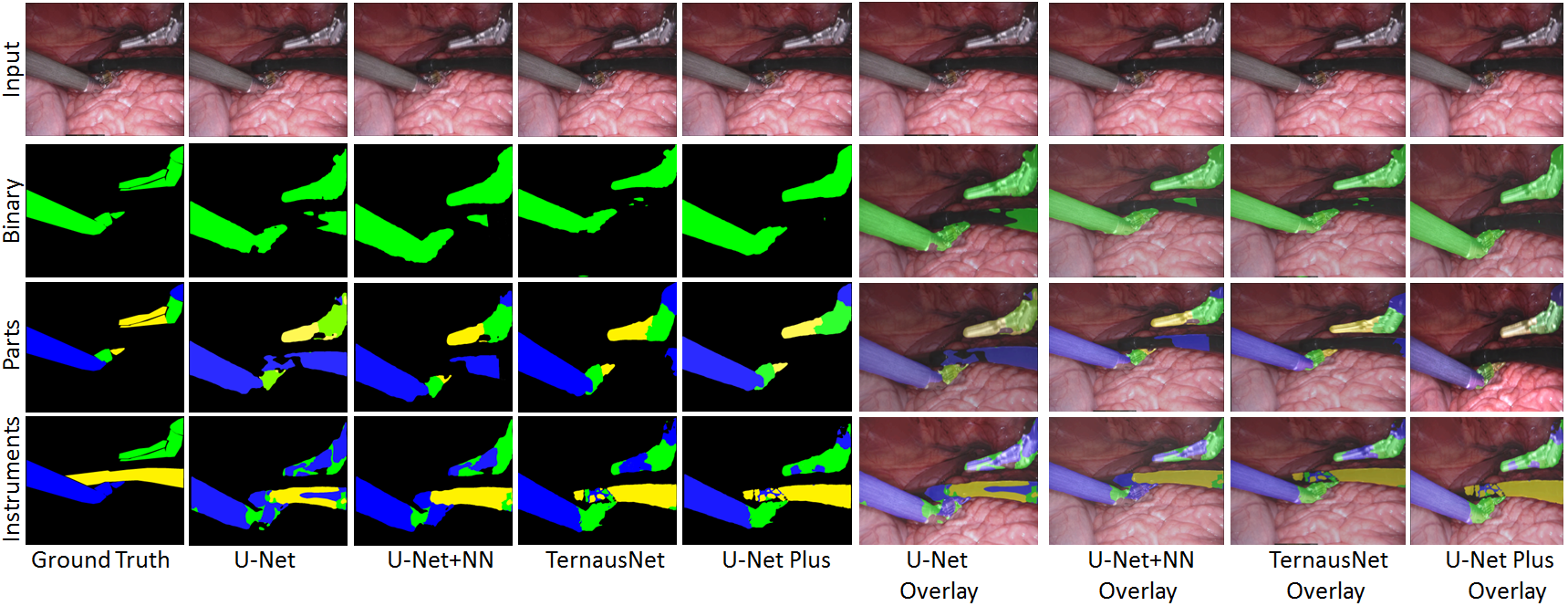
With the advent of robot-assisted surgery, there has been a paradigm shift in medical technology for minimally invasive surgery. However, it is very challenging to track the position of the surgical instruments in a surgical scene, and accurate detection & identification of surgical tools is paramount. Deep learning-based semantic segmentation in frames of surgery videos has the potential to facilitate this task. In this work, we modify the U-Net architecture by introducing a pre-trained encoder and re-design the decoder part, by replacing the transposed convolution operation with an upsampling operation based on nearest-neighbor (NN) interpolation. To further improve performance, we also employ a very fast and flexible data augmentation technique. We trained the framework on 8 x 225 frame sequences of robotic surgical videos available through the MICCAI 2017 EndoVis Challenge dataset and tested it on 8 x 75 frame and 2 x 300 frame videos. Using our U-NetPlus architecture, we report a 90.20% DICE for binary segmentation, 76.26% DICE for instrument part segmentation, and 46.07% for instrument type (i.e., all instruments) segmentation, outperforming the results of previous techniques implemented and tested on these data.
Video
Dataset
For both training and validation, we used the Robotic instruments dataset from the sub-challenge of MICCAI 2017 Endoscopic Vision Challenge [22]. The training dataset has 8 × 225 frame sequences with 2 Hz frame rate of high resolution stereo camera images collected from a da Vinci Xi surgical system during laparoscopic cholecystectomy procedures. The frames were re-sampled from 30 Hz video to 2 Hz to avoid any redundancy issues. A stereo camera was used to capture the video sequences that consists of the left and right eye views with resolution of 1920 × 1080 in RGB format. In each frame, the articulated parts of the robotic surgical instrument consisting of a rigid shaft, an articulated wrist, and claspers, have been manually labeled by expert clinicians. The test set has 8×75 frame sequences and 2×300 frame videos. The challenge is to segment 7 classes such as prograsp forceps, needle driver, vessel sealer, grasping retractor etc.Method: U-NetPlus
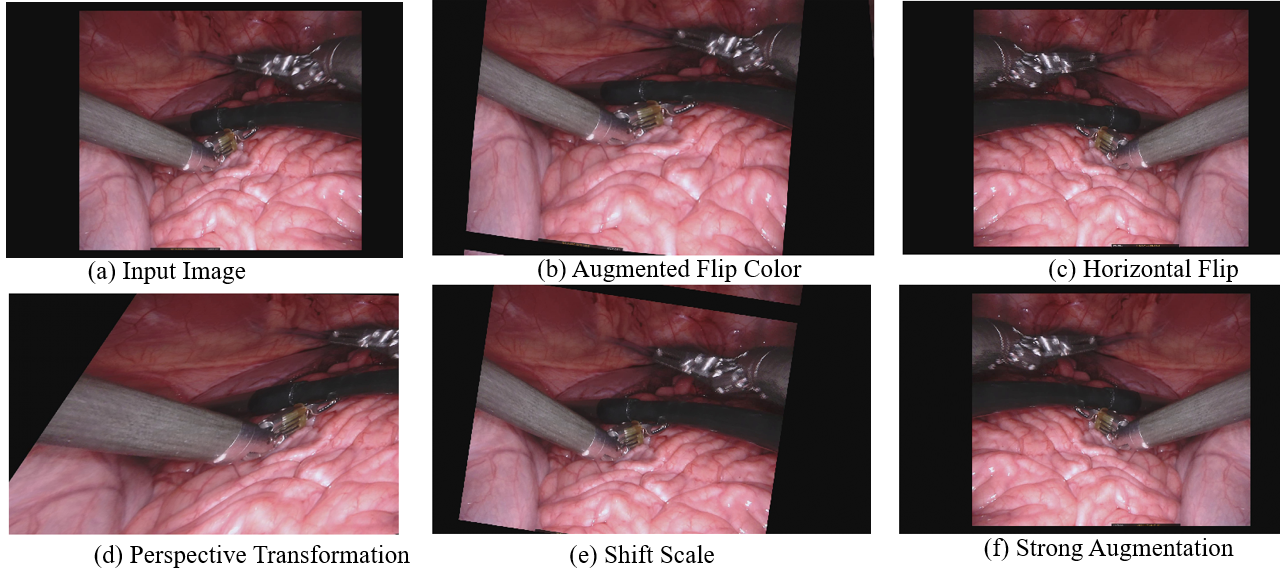
Augmentation
Qualitative Results
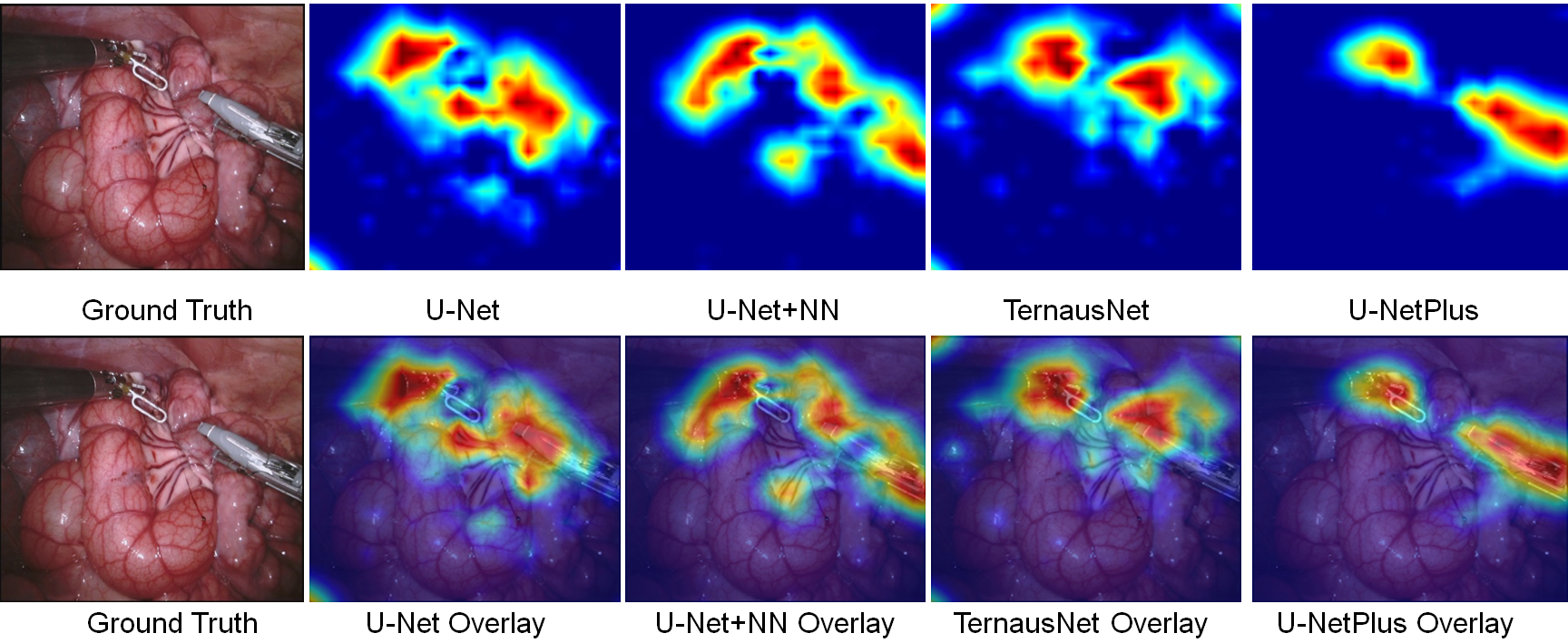
Ablation Study
Citation
If you find our work useful in your research, please consider citing:
@inproceedings{hasan2019u,
title={U-NetPlus: A modified encoder-decoder U-Net architecture for semantic and instance segmentation of surgical instruments from laparoscopic images},
author={Hasan, SM Kamrul and Linte, Cristian A},
booktitle={2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC)},
pages={7205--7211},
year={2019},
organization={IEEE}
}
U-NetPlus participated post MICCAI EndoVis-2017 Challenge
Coming soon!Acknowledgements
Research reported in this publication was supported by the National Institute of General Medical Sciences of the National Institutes of Health under Award No. R35GM128877 and by the Office of Advanced Cyber infrastructure of the National Science Foundation under Award No. 1808530. .